
Yes, these are more expensive than the yellow motors. I like the motor referenced in previous post. Mainly because encoder and motor are one item. When using the yellow motors, then sensor to read the slotted disc must be mounted. Its just simpler for the students to use the more expensive motor.However, I do have a few questions. One, the motor you linked seems great, but it is much higher priced than others, especially once factoring in that you need at least 2, one for each wheel. Is there any real advantage over the "yellow" motors that you find on kits, i.e. the ones with external encoders that you said make 20 or so pulses per rotation? I understand that it is more precise, but how much better is 300 than 20? Is there any speed difference?
This is my opinion on 20 vs 540 counts per revolution. As with a 45 to 1 gear ratio, its 540 counts per revolution because the encoder is before the 45:1 ratio. The encoder is 12 counts per revolution. Therefore 45 times 12 counts = 540 counts per revolution.
If you are using a 7.5cm diameter wheel, that is 23.56 cm per wheel rotation. At 20 counts per revolution, the accuracy is (23.56cm / 20 counts) 1.18 cm per count. At that accuracy the robot could be positioned within a few centimeters of the target at best. With the 540 counts per revolution, then the accuracy is (23.56 cm / 540) 0.044 cm. Which is overkill on the positioning accuracy. But I prefer the higher counts to help control the motor speed. Since there are two motors (left & right), both need to rotate at near the same speed to move in a straight line. The 540 counts can help improve motor speed control when using a PID loop control for speed. The example TopFinishKits program does use a PID speed control. Just the PID loop needs to be tuned. Which should be another thread as that requires a much larger discussion.
The issue is the basic Arduino is limited on sensor inputs. You would need to use a larger Arduino with more inputs and outputs to have multiple ultrasonic sensors.Also, from my understanding, the ultrasonic sensor has a limited viewing angle - is it possible/beneficial to install multiple sensors on the topfinishkit robot without any hardware modifications, except for printable (I have a printer and some CAD knowledge, so I can figure out mounting), in terms of connecting electronically to the arduino.
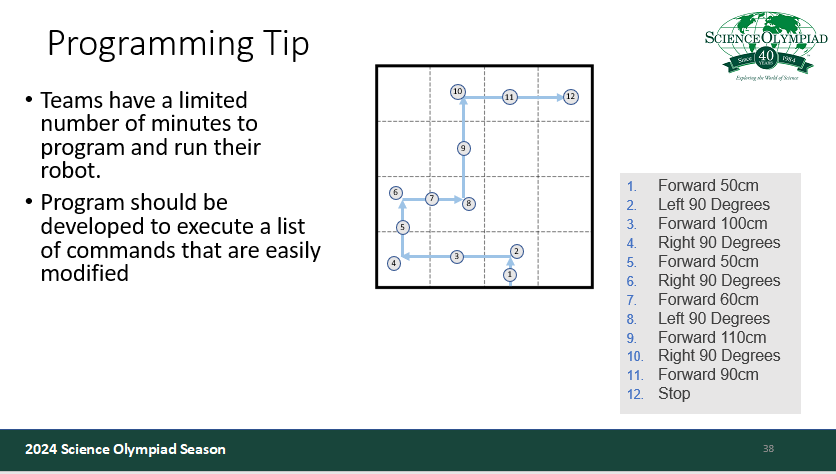
Below is an example concept for programming a robot. This is from a presentation I have given on Robot Tour at several of the coach clinics. Below shows a recommended concept on how to program a robot. Again the TopFinishKits sample program shows a method to create the command list below.Finally, for the software. I have very limited knowledge in arduino, but plenty in object-oriented languages in general, so I want to try to understand to see how tricky it will be. For the robot to function autonomously, I think there's two possible ways, so which one is better (or is it even allowed?):
1) looking at the track and programming a path beforehand (but is 10 minutes enough, and how would you program if you can't even test it?)
2) go straight forward and turn with obstacle avoidance until the end is reached (but how would you get to the gate zone, or make sure not to go backwards?)
I hope this helps.


